First Year Faffing Around
A honest look back at my first year of university — the bridges, the beams, the prints, and the software tools I built between classes.
Objective
To survive first year. Beyond that — to use the gaps between lectures, assignments, and tutoring sessions to actually build things, and see whether the theory I was studying held up in the real world.
This page is a retrospective of everything I made, broke, printed, and shipped during my first year of a double degree in Mechanical Engineering and Biomedicine at Monash University. None of it is perfect. All of it taught me something.
Planning
First year didn’t leave a lot of free time, so most of these projects were squeezed into evenings and the summer break. The common thread was a desire to connect coursework concepts — control systems, structural mechanics, additive manufacturing — to something tangible. I also wanted to explore software development and AI tooling beyond what was covered in the curriculum.
The projects that came out of this period were:
- A ball balance beam control system (mechanical + Raspberry Pi)
- A VCE English trial exam generator (Python + AI API)
- A set of 3D printing explorations using my Bambu P1S
- Two university team projects — ENG1011 (bridge) and ENG1013 (multi-subsystem engineering system)
Purpose
Each project served a different purpose:
The ball balance beam was a deliberate attempt to apply what I was learning in dynamics and control — PID loops, servo actuation, sensor feedback — in a physical system I designed and printed myself.
The exam generator came from a practical problem in my tutoring work. Writing custom VCE English trial exams by hand is time-consuming. I wanted to automate the repetitive parts while keeping the output educationally sound.
The 3D printing work was partly hobby, partly skill-building — learning the nuances of FDM printing, tolerances, and design-for-manufacture by doing it repeatedly.
The university projects were team-based and assessed, but I took on leadership roles in both and treated them as genuine engineering exercises rather than just assignments to complete.
Process
Ball Balance Beam
The system balances a ping-pong ball along a V-shaped beam by adjusting the beam’s angle via a high-torque hobby servo. A distance sensor at one end reads the ball’s position; a Raspberry Pi runs a PID control loop and updates the servo command continuously.
All mechanical components — the beam, pivot housing, and sensor mount — were modelled and printed by me. The design process was iterative: I went through several versions before landing on a geometry that was stiff enough and printable without supports. One key lesson was the value of CAD assembly simulation — I wasted several prints on clearance issues that a virtual fit-check would have caught.
At the time of writing this portfolio, the mechanical assembly was complete. The sensor wiring, servo linkage, and PID implementation were still in progress.

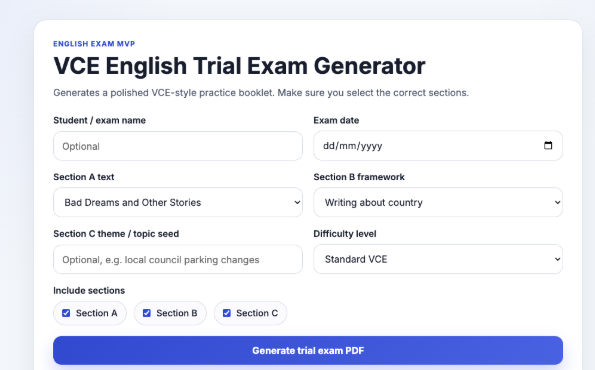
VCE English Trial Exam Generator
This is a Python application that generates structured VCE English trial exams in PDF format. A user inputs key parameters (text, section focus, difficulty signals), the application sends structured prompts to an LLM API, and the output is formatted into a print-ready PDF.
The project evolved significantly over 2025 — from a rough terminal script with a hardcoded API key to a cleaner application with a separated frontend and backend. I used GPT o3, o4-mini, and GPT-5.2 to accelerate development and troubleshoot edge cases, while writing the prompt architecture myself. Prompt design turned out to be the most technically demanding part: shaping the model’s output to match VCAA’s Section A, B, and C structure required careful iteration.
The MVP works. The known weaknesses are inconsistent image generation for Section A and occasional structural drift in Section C long-form responses — both targets for the next iteration, ahead of the 2025 VCE exam season.
Skills developed: Python, REST API integration, prompt engineering, PDF generation, basic frontend/backend structuring, iterative debugging.
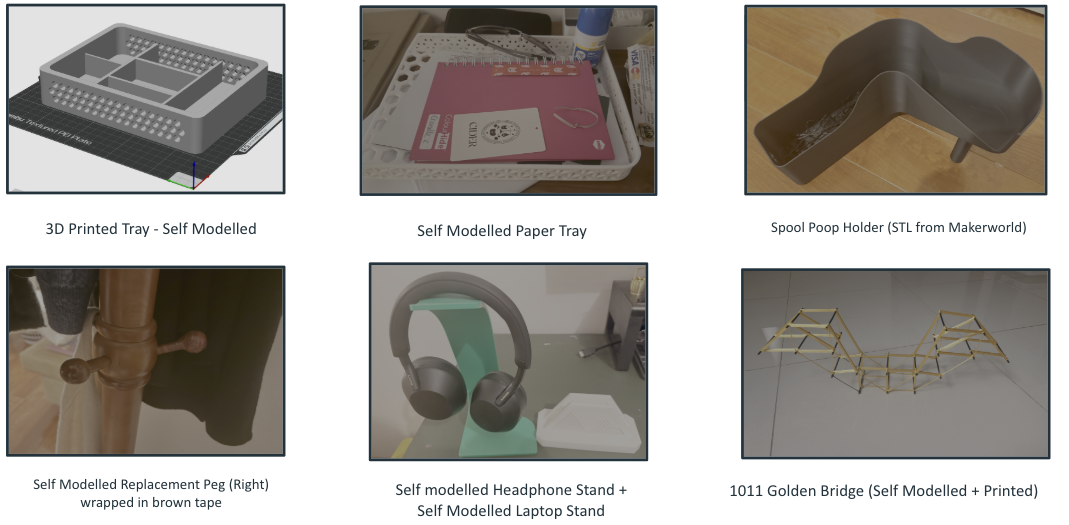
3D Printing
My Bambu P1S became a core tool this year rather than a novelty. Some highlights:
- Self-modelled replacement peg — a broken household item, measured by hand, modelled in CAD, printed and fitted. First time I closed the full design-to-use loop on something practical.
- Headphone stand — designed to fit my specific desk setup. Required two iterations to get the cable routing right.
- Laptop stand — ventilated, adjustable angle. Printed in PETG for rigidity.
- Paper tray — modelled with interlocking geometry; good practice for tolerances.
- ENG1011 Golden Bridge components — structural members printed in PLA, used in the university bridge project below.
- Spool holder from Makerworld — not self-modelled, but a useful community file that taught me how to evaluate and modify external STLs.
One consistent lesson: Bambu’s slicer makes the print process smooth, but it doesn’t remove the need to understand layer orientation, infill choices, and wall thickness for structural parts. I got that wrong a few times.
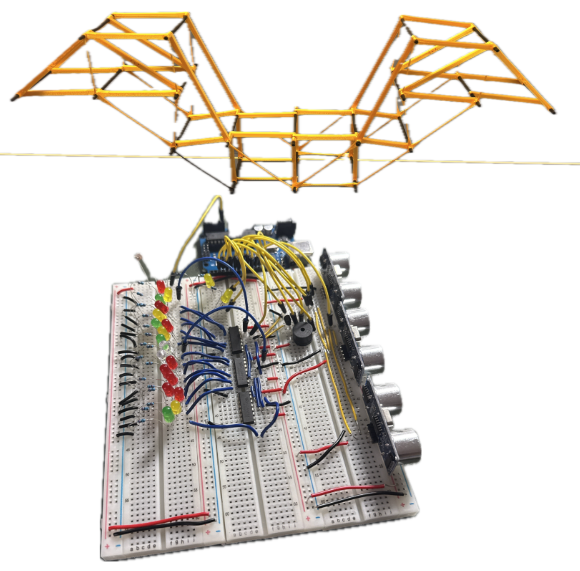
ENG1011 — Bridge Project & ENG1013
The ENG1011 brief: design and build a bridge to span a set distance while passing beneath a height restriction. My team elected to use 3D-printed rod members for the main structural elements — partly to explore additive manufacturing in a structural context, partly to chase an optional design criterion.
I contributed to the planning, load calculations, member printing, and final assembly, and took on a coordination role within the team.
The bridge did not fail as predicted. The 3D-printed rods exhibited significant torsional flex under load — a behaviour we had not adequately modelled — which led to a failure mode different from our analysis. It didn’t win any awards. It was, however, one of the more instructive failures of the year: real materials don’t behave like textbook assumptions, and the gap between a calculation and a physical outcome is where most engineering actually happens.
ENG1013 involved designing, building, and integrating a multi-subsystem engineering system as a team. I again took on a leadership and coordination role, responsible for task allocation and keeping the five subsystems aligned across the group. My primary technical contribution was Subsystem 4, but I also spent significant time debugging across the other subsystems when integration issues emerged. The team achieved a High Distinction.
The main skill developed here wasn’t technical — it was learning how to keep a group of people with different working styles and skill levels moving toward the same outcome under a deadline. That’s harder than it sounds.
Results & Accomplishments
- Delivered a functional (MVP) VCE exam generator used in active tutoring sessions
- Designed and printed all mechanical components for a PID-controlled balance beam
- Built a working 3D printing workflow producing functional, daily-use objects
- Led two university team projects, contributing to a High Distinction in ENG1013
- Developed a clearer picture of where my interests sit: at the intersection of mechanical systems, software, and AI tooling
Further Research & Development
The ball balance beam is the most obvious next step — getting the sensor wiring, servo linkage, and PID loop running. Once the basic loop is stable, I’d like to experiment with different control strategies and potentially add a camera-based position sensor.
The exam generator needs prompt refinement for Section C consistency and a cleaner UI before it’s ready to share publicly.
More broadly, first year showed me that I work best when I’m building toward something real. The projects that held my attention longest were the ones with a clear user (even if that user was just me), a physical or functional output, and enough complexity to require genuine problem-solving. That’s the filter I’ll apply to projects going forward.